SBRBC-01工业机器人基础工作站设备(ABB机器人系统)
一、 设备彩图:
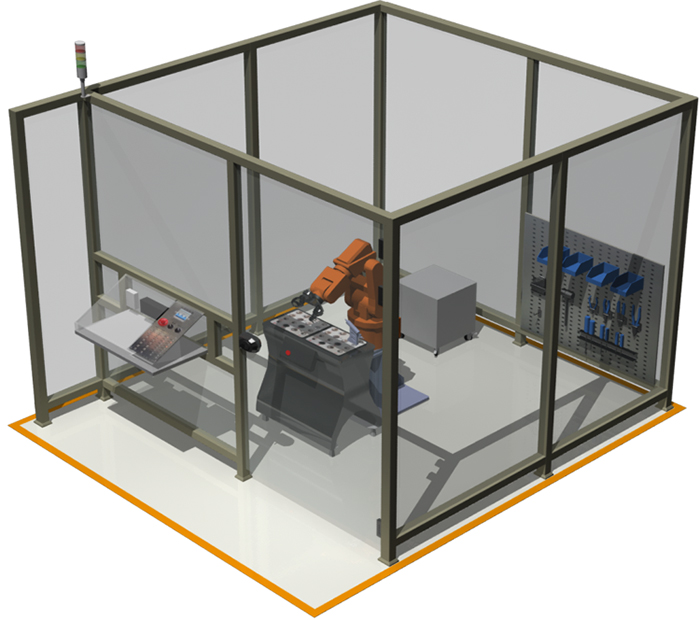
(图片仅供参考、以实际配置为准)

工业机器人基本技能工作室案例照片(仅供参考)
二、设备概述:
设备属于工业机器人基础技能培训应用设备,以6轴机器人为中心,根据任务要求配置不同任务载体,培养学生对机器人基础知识的认知。任务模型的开发融入了趣味性与娱乐性,可以增加学员的学习兴趣,通过不断的重复训练,强化学员对基本的点示教、直线、曲线等运动足迹的了解与掌握,学习精确点的定位及机器人运动路线选择优化;使学生对机器人应用技术有初步了解与掌握。
该设备任务载体采用模块化设计,具备独立性、兼容性、可移植性等特点;并预留了扩展与升级的接口,根据市场需求进行不断的开发升级或者学校用户自行创新设计新的功能模块。
针对工业机器人应用维护专业基础技能训练与实习,该阶属于机电工学结合类技能向工业机器人过渡的关键环节,通过简单易操作的机器人本体操作的学习,加强安全意识与规范意识的培养,让学生掌握如何与工业机器人"打交道"。
三、技术参数:
工作电源:单相三线制 AC220V±5% 50HZ
安全保护:漏电保护,过流保护,短路保护
额定功率:≤2KW
环境温度:-10~50℃
相对温度:≤85%
外形尺寸:L2200~3000mm×W2200~3000mm×H2000mm(参考)
四、产品配置参数:
1、工业机器人本体系统配置参数:
1) 功能、参数及特点描述:
① ABB机器人IRB120-3/0.58,有效负载3kg,臂展0.58米,重复定位精度0.01mm;铝合金马达,结构轻巧,功率强劲,确保精准度,本体重25kg;多角度安装,可使其不受任何空间限制;气路管路与用户信号线缆由机身底脚至手腕全部嵌入机器人内部,利于机器人集成;
② 配套IRC5工业紧凑型控制器,有效节省占地空间,AC220V电源,外置式信号接头,简化了调试步骤;
③ 带RobotStudio机器人控制软件,可有效提升编程速度,软件带仿真功能,可随时验证编程效果;
④ 本体到控制器3~7m长电缆;
⑤ 示教器具中文操作界面,本体到示教器3~7m长线缆;
⑥ 带DC24V 16in/16out IO卡;
⑦ 底座由20mm厚钢板与Φ160mm钢管焊接而成,表面发黑处理,坚固耐用,能有效防止锈蚀;底板有6组膨胀螺丝与地面固定,保证安装的稳固,连接机器人的腰型孔设计特别适合小型机器人安装,并能满足多种同类型机器人安装使用;尺寸:400×350×405mm;
⑧ 配置3组电磁阀组,为机器人安装不同夹具提供动力,连接方便快捷;
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
机器人 |
IRB120-3/0.58 3公斤 |
套 |
1 |
|
1) |
本体 |
3公斤,580mm行程半径 |
台 |
1 |
|
2) |
控制器 |
220V电源,本体配套 |
个 |
1 |
|
3) |
IO卡 |
24V ,16输入/16输出 |
个 |
1 |
|
4) |
软件光盘 |
机器人光盘 |
个 |
1 |
|
2 |
机器人底座 |
钢板焊接 |
台 |
1 |
|
3 |
电磁阀组 |
3组独立 |
套 |
1 |
3) 工业机器人系统图片:

2、电气控制板配置参数:
1) 功能、参数及特点描述:
① 操作面采用透明有机玻璃,利于观察,方便监视内部电气元件运行情况;水平30?斜面设计,符合人体操作观察规律,操作舒适,底脚T型台阶设计,整体有不小于350mm×300mm的空白区域,方便资料存放;有机玻璃可整体取下,方便维护保养;
② 操作控制区配有漏电开关、急停按钮、转换开关、钮子开关、LED指示灯;漏电开关作为设备的电源控制,由过流、短路等保护功能;急停按钮用于发生突发情况下紧急切断电源,避免事故的扩大;转换开关用于设备电源上电使用;多路钮子开关作为输入信号与机器人信号关联,方便操作控制机器人运行;多路LED灯与机器人输出信号关联,实时指示机器人当前运行状态,效果直观;操作区面板采用2mm后不锈钢加工而成,表面印有每个元件编号代码;
③ 框架采用优质铝材加工氧化而成,坚固美观;
④ 底板有优质钣金加工喷涂而成,机加冲出网状结构,方便电气元件安装;
⑤ 底板安装PLC、交流接触器、开关电源、继电器等电气元件;交流接触器提供设备电源的接入与断开,是设备动力的来源;开关电源为设备运行提供必要的安全操作电源;继电器作为控制信号的转换为外部多种控制方法提供方便;为保证机器人信号的绝对安全,通过PLC对输入输出机器人信号进行转换,并能通过PLC编程灵活改变外部信号与机器人信号关联的多样性,利于考核学员验证学习效果及竞赛试题的多样性选择。
⑥ 尺寸:605×405×266mm;
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
交流接触器 |
CJX2-2510 220V |
个 |
1 |
|
2 |
开关电源 |
24V 3.5A |
个 |
1 |
|
3 |
急停按钮 |
HB22-11TS红 |
个 |
1 |
|
4 |
旋钮式按钮开关 |
NP2-BD,Φ22/黑/ |
个 |
1 |
|
5 |
钮子开关 |
MTS-102 |
组 |
1 |
|
6 |
断路器 |
DZ47-60/3P |
台 |
1 |
|
7 |
继电器 |
CR-M024DC4L |
组 |
1 |
|
8 |
指示灯线路板 |
LED指示灯 |
套 |
1 |
|
9 |
操作面板 |
S304(蚀刻) |
块 |
1 |
|
10 |
网板 |
电气件安装 |
块 |
1 |
|
11 |
操作区 |
有机玻璃全透明 |
套 |
1 |
|
12 |
支持框架 |
铝材加工 |
套 |
1 |
3、模型实训平台配置参数:
1) 功能、参数及特点描述:
① 钢制支撑架,弧形设计,造型美观,四角由膨胀螺丝与地面固定,坚固稳重;
② 钢制台面板,厚度12mm,表面镀鉻处理,具有40×40mm网格 M5螺纹安装孔,能够兼容牢靠安装多种工作对象,方便快捷;
③ 配置电气接口盒:1路气路控制接口并能对输出气量进行调节,1路急停按钮以备突发紧急情况下使用,1组模型信号接口,可接入传感器信号及控制输出电磁阀等信号。
2)单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
台面板 |
12mm钢制(渡铬) |
件 |
1 |
|
2 |
急停按钮 |
HB22-11TS红 |
个 |
1 |
|
3 |
隔板直通接头 |
J-KJE06-00 |
个 |
1 |
|
4 |
可调单向阀块 |
ASC100-06 |
个 |
1 |
|
5 |
螺纹直通接头 |
APC6-01 |
个 |
2 |
|
6 |
按压式端子 |
3位 |
个 |
2 |
|
7 |
支撑架 |
钢制加工 |
套 |
1 |
3) 模型实训平台图片:

4、绘图笔夹具配置参数:
1) 功能、参数及特点描述:
① 铝材加工氧化处理,笔杆内空,可装入笔芯进行绘制;安装到机器人J6轴上,并能根据姿势对笔杆伸出距离进行调整;用于轨迹训练模型配套使用。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
笔夹 |
铝制,加工氧化 |
个 |
1 |
|
2 |
笔杆 |
铝制,加工氧化 |
个 |
1 |
|
3 |
笔头 |
黄铜,加工 |
个 |
1 |
|
4 |
安装板 |
铝制,加工氧化 |
个 |
1 |
3) 绘图笔夹具图片:

5、抓手吸盘夹具配置参数:
1) 功能、参数及特点描述:
① 铝材加工氧化处理,集成抓手与吸盘两种功能,能对多种物料进行处理,抓手集成了两种功能,能分别抓取两种形状规格不同的物料;吸盘也有2路设计,可分别独立使用,也能同时配合使用,可根据要求选择一种或多种方式同时使用,满足教学多样性及自主选择性。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
真空吸盘 |
ZPT06BN-A5 |
个 |
2 |
|
2 |
气夹气缸 |
HDT10*20 |
个 |
1 |
|
3 |
节流阀 |
J-AS1201F-M5 |
个 |
2 |
|
4 |
真空发生器 |
ZH07BS-06-06 |
个 |
2 |
|
5 |
隔板接头 |
M-5E |
个 |
2 |
|
6 |
接头 |
J-KQ2H06-M5 |
个 |
2 |
|
7 |
机加件 |
铝制,加工氧化 |
批 |
1 |
|
8 |
真空吸盘 |
ZPT06BN-A5 |
个 |
2 |
3) 抓手吸盘夹具图片:

6、双吸盘夹具配置参数:
1) 功能、参数及特点描述:
① 铝材加工氧化处理,2路吸盘独立设计,可分别独立使用,也能同时配合使用,能满足玻璃板、(圆形、方形、五角星、五边形、六边形、)物料块、半球形物料等多种物料的吸取,做到多个任务夹具通用;
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
真空吸盘 |
ZPT10UN-A5 |
个 |
2 |
|
2 |
直通接头 |
KQ2F06-M5A |
个 |
2 |
|
3 |
真空发生器 |
ZH07BS-06-06 |
个 |
2 |
|
4 |
机加件 |
铝制,加工氧化 |
批 |
1 |
3) 双吸盘夹具图片:

7、车窗吸盘夹具配置参数:
1) 功能、参数及特点描述:
① 铝材加工氧化处理,2路吸盘独立设计,可分别独立使用,也能同时配合使用,能满足对车窗玻璃板物料的吸取,用于车窗涂胶模型配套使用。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
真空吸盘 |
ZPT06BN-A5 |
个 |
2 |
|
2 |
隔板接头 |
M-5E |
个 |
2 |
|
3 |
接头 |
J-KQ2H06-M5 |
个 |
2 |
|
4 |
真空发生器 |
ZH07BS-06-06 |
个 |
2 |
3) 车窗吸盘夹具图片:

8、轨迹训练模型配置参数:
1) 功能、参数及特点描述:
① 不锈钢加工制造,四角螺丝固定,安装方便快捷;表面由平面与弧面组成,无痕迹自然过渡,在平面、曲面上蚀刻不同图形规则的图案,以绘图笔夹具描绘图形,训练对机器人基本的点示教,直线、曲线运动足迹的掌握;学习点的定位及机器人运动路线选择优化。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
不锈钢加工件 |
钢制,焊接加工 |
件 |
1 |
|
2 |
蚀刻菲林 |
蚀刻工艺 |
件 |
1 |
3) 轨迹训练模型图片:

9、工件装配模型配置参数:
1) 功能、参数及特点描述:
① 以一个固定在操作台工件为主体"工件3";
② 机器人通过抓手或吸盘拾取"工件1"并把"工件1"精确装配到主体"工件3"内;
③ 机器人通过抓手或吸盘拾取"工件2"并把"工件2"从上至下穿入"工件1"和"工件3";或从侧面把"工件2"穿入"工件1"和"工件3"内;
④"工件1"装配到"工件3"采用从上而下装配,"工件2"装配有两种方式,可以从上至下,也可以从侧面穿入;
⑤ 训练对机器人精确定位及抓手吸盘夹具的学习。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
工件3 |
铝制,加工氧化 |
件 |
1 |
|
2 |
放置板 |
铝制,加工氧化 |
件 |
1 |
|
3 |
工件1 |
PVC加工 |
件 |
1 |
|
4 |
工件2 |
PVC加工 |
件 |
1 |
3) 工件装配模型图片:

10、车窗涂胶装配模型配置参数:
1) 功能、参数及特点描述:
① 涂胶机、汽车模型底板、车窗工件板分别固定到操作台上;
② 机器人通过吸盘夹具到车窗工件板拾取汽车车窗;对拾取的车窗到涂胶机进行涂胶,完成后把车窗装配到汽车上;而后拾取第二块车窗,依次完成前窗、后窗的拾取、涂胶、装配任务;
③ 练习对机器人点的示教、机器人运动轨迹选择及与涂胶机的配合。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
先导式电磁阀 |
SBJ512-5LZD-M5 |
个 |
1 |
|
2 |
汽车模型 |
1:32 |
台 |
1 |
|
3 |
真空发生器 |
ZH07BS-06-06 |
个 |
1 |
|
4 |
Y型三通 |
KJU06-00 |
个 |
1 |
|
5 |
L接头 |
KQ2L06-M5 |
个 |
3 |
|
6 |
机加件 |
铝制,加工氧化 |
批 |
1 |
3) 车窗涂胶装配模型图片:

11、零件码垛模型配置参数:
1) 功能、参数及特点描述:
① 铝材加工氧化的物料摆放板和码垛板固定到操作台;
② 根据要求物料块被摆放到摆放底板上,机器人通过吸盘夹具按要求拾取物料块进行码垛工作;
③ 物料块形状规格一致,操作者可根据需要选择摆放数量,可单层或多层叠加摆放;可根据需要自由组合码垛出多种形状;
④ 练习对机器人码垛、阵列的理解并快速编程示教的强化训练。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
零件码垛板 |
铝制,加工氧化 |
件 |
1 |
|
2 |
零件摆放板 |
铝制,加工氧化 |
件 |
1 |
|
3 |
零件物料块 |
多种颜色 |
批 |
1 |
3) 零件码垛模型图片:

12、图块搬运模型配置参数:
1) 功能、参数及特点描述:
① 分为单一形状图块搬运、多形状图块搬运;
② 多形状图块搬运:机器人通过吸盘夹具依次把一个图块板摆放好的多种形状物料(方形、圆形、五边形、六边形、五角星)拾取搬运到另一个物料板上;
③ 单面锥形图块搬运:机器人通过吸盘夹具依次把一个图块板摆放好的锥形图块拾取搬运到另一个图块板上;
④ 每个图块板对应工位都蚀刻有物料编号;
⑤搬运形式可根据要求灵活组合,形式多样,能满足平面、阵列、指定编号位置、多种图块混合等要求;
⑥ 强化对机器人点位移训练与理解。
2)单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
物料托盘1 |
铝制(蚀刻号码)加工氧化 |
件 |
2 |
|
2 |
物料托盘2 |
铝制(蚀刻号码)加工氧化 |
件 |
2 |
|
3 |
图块物料1 |
POM(白)机械加工 |
件 |
16 |
|
4 |
图块物料2 |
POM(五角、五边、六边、四边、圆形)机械加工 |
件 |
20 |
3) 图块搬运模型图片:

13、检测排列模型配置参数:
1) 功能、参数及特点描述:
① 检测玻璃板采用梯形设计,检测方式为分辨出梯形的长边与短边;
② 玻璃板原始随机存放在存储仓内,摆放装置采用短边插入,分为左右两个方向,根据检测结果分辨长边;
③ 机器人通过吸盘夹具依次拾取玻璃板到检测台检测,根据检测判断玻璃长边选择插入方向;依次循环;
④ 训练对机器人对有不同结果判断选择的精确定位。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
光纤放大器 |
D10BFP |
个 |
1 |
|
2 |
光纤 |
PBT46U |
个 |
1 |
|
3 |
检测模型物料 |
蓝色透明有机玻璃 |
件 |
8 |
|
4 |
机加件 |
铝制加工氧化 |
批 |
1 |
3) 检测排列模型图片:

14、实训任务存储箱配置参数:
1) 功能、参数及特点描述:
① 存储箱采用尺寸:720 mm×380 mm×550mm
② 可多层叠放;四周采用顶级铝合金框架包边,外壳防火板制作,坚固耐用;内衬EVA EPE减震海绵,可有效更好地保护设备,防止运输损伤;
③ 箱身两侧安装隐形提手,采用顶级压铸技术,造型设计与箱体近乎一体,坚固牢靠方便搬运;
④ 箱体顶部四角带防撞球角,可有效避免运输中的磕碰,同时又能作为存放多个箱体叠放固定支撑,减少存放面积;
⑤ 箱体内部可分层存储器件,每层有独立存储托盘,带独立拉手及支撑柱,钣金加工制作,坚固牢靠;内衬采用珍珠棉材料,对存放零部件位置刀模加工,保证位置准确;
⑥ 隔层板每层承重50kg,箱体外部可承重200KG。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
箱体 |
蓝色防火板 |
件 |
1 |
|
2 |
箱体拉手 |
不锈钢 |
对 |
1 |
|
3 |
箱盖锁扣 |
不锈钢 |
对 |
1 |
|
4 |
隔层板 |
2.0mm厚钣金加工 |
套 |
1 |
|
5 |
箱体包边 |
铝合金 |
套 |
1 |
|
6 |
层板拉手 |
与隔层板配套 |
套 |
1 |
|
7 |
内衬 |
硬泡沫,与装模型配套 |
套 |
1 |
3) 实训任务存储箱图片:

15、工具收纳墙配置参数:
1) 功能、参数及特点描述:
① 2.0mm优质厚钢网板制作而成,能固定于墙体上;
② 有10多个工具位置,每个位置带有定制目视化管理标识;
③ 用于存放各种工具及螺丝螺母等零件,形象直观,存放方便,利于搬运,占用空间小,是工具零件存储保管的理想载体;
2)单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
挂板 |
钢制加工、丝印,目视化管理 |
件 |
1 |
|
2 |
工具架 |
摆放工具 |
批 |
1 |
3)工具收纳墙图片:

16、安全护栏配置参数(由现场定做):
1) 功能、参数及特点描述:
① 隔离护栏,总体高2000mm,框架采用2mm厚灰色铝合金材料,其他全部安装10mm厚透明钢化玻璃;带一个侧开门,占地以2200~3000mm×2200~3000mm为宜;
② 系统工作站安装有急停按钮,以备紧急情况使用;
③ 三色警示灯以不同颜色显示系统当前运行状态;
④ 门磁安全开关安装在进出门位置,保证系统运行时安全门是关闭的,保护人身安全;
⑤ 全透明隔离设计即保证设备运行时的安全,又不影响参观演示效果;
⑥ 在隔离护栏、安全门、设备等显眼位置粘贴多种安全标识,实时提醒设备的安全运行。
2) 单套配置:
|
序号 |
名称 |
规 格 |
单位 |
数量 |
|
1 |
警示灯 |
DC24V 5W 黄绿红 |
个 |
1 |
|
2 |
安全开关 |
LG-03F |
件 |
1 |
|
3 |
铝制线槽 |
40*30 |
米 |
8 |
|
4 |
玻璃(现场定做) |
钢化清玻,10mm |
米² |
8~18 |
|
5 |
安全标示 |
喷画制作 |
套 |
1 |
|
6 |
型材框架(现场定做) |
2mm厚 |
米 |
12~18 |
17、空气压缩机参数:

1) 特点描述:
① 静音,12L
2) 空气压缩机图片:
五、产品特点:
① 开放式设计:可根据实训内容选择机器人使用夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
② 模具化运用:所有模型及夹具全部装入实训任务存储箱内,使用保存方便快捷,节约空间,便于管理。
六、SBRBC-01工业机器人基本技能工作站配置清单
|
序号 |
物 料 名 称 |
规 格 型 号 |
单位 |
数量 |
|
1 |
ABB-IRB120机器人 |
SBRBC-01-01 |
台 |
1 |
|
2 |
模型实训平台 |
SBRBC-01-02 |
台 |
1 |
|
3 |
轨迹训练模型 |
SBRBC-01-03 |
台 |
1 |
|
4 |
工件装配模型 |
SBRBC-01-04 |
台 |
1 |
|
5 |
检测排列模型 |
SBRBC-01-05 |
台 |
1 |
|
6 |
车窗涂胶装配模型 |
SBRBC-01-06 |
台 |
1 |
|
7 |
零件码垛模型 |
SBRBC-01-07 |
台 |
1 |
|
8 |
图块搬运模型 |
SBRBC-01-08 |
台 |
1 |
|
9 |
电气控制板组件 |
SBRBC-01-09 |
台 |
1 |
|
10 |
安全护栏组件(2米) |
SBRBC-01-10A |
套 |
1 |
|
11 |
工具墙组件 |
SBRBC-01-11 |
台 |
1 |
|
12 |
基础双吸盘夹具 |
SBRBC-01-12 |
台 |
1 |
|
13 |
基础绘图笔夹具 |
SBRBC-01-13 |
台 |
1 |
|
14 |
基础抓手吸盘夹具 |
SBRBC-01-14 |
台 |
1 |
|
15 |
基础车窗吸盘夹具 |
SBRBC-01-15 |
台 |
1 |
|
16 |
空气压缩机 |
TYW-1A 12L |
台 |
1 |
|
17 |
工业机器人基础工作站(ABB)使用说明书 |
SBRBC-01 |
本 |
1 |
|
18 |
工业机器人基础工作站(ABB)配套光盘 |
SBRBC-01 |
张 |
1 |
|
19 |
实训任务装箱 |
SBRBC-01-21 |
套 |
1 |
七、主要实训考核项目:
1、工业机器人的基本认识;
2、工业机器人示教器运动操作;
3、工业机器人的点位示教;
4、工业机器人基本参数设置;
5、工业机器人基本运动指示学习;
6、工业机器人基于示教器的程序编辑;
7、工业机器人控制应用;
8、工业机器人基本接线方法;
9、简单轨迹运行编程与示教;
10、平面描图任务编程与示教;
11、圆形描图任务编程与示教;
12、曲面描图任务编程与示教;
13、固定位置搬运编程与示教;
14、指定位置搬运编程与示教;
15、平面矩阵立体码垛编程与示教;
16、吸盘夹具的控制与应用;
17、抓手夹具的控制与应用;
18、工件装配任务的编程与示教;
19、玻璃板检测与分类编程与示教;
20、车窗涂胶任务的编程与示教;
21、绘图笔夹具的安装;
22、轨迹训练模型的安装;
23、双吸盘夹具的安装;
24、图块搬运模型的安装;
25、零件码垛模型的安装;
26、抓手吸盘夹具的安装;
27、工件装配模型的安装;
28、检测排列模型的安装与接线;
29、车窗涂胶模型的安装、接线及气路连接。





