2025年3月27日
SB-QDMX气动机械手实训模型(实物)
气动机械手实物模型:含回转气缸、双轴气缸、单轴气缸、气爪、电磁阀、调速阀、磁性开关、机械部件等,整个实训过程既可以通过上位机软件进行控制和实时监控又可进行手动控制。能开展对气动机械手的维护、设备操作及控制等技能训练,适合各院校《可编程控制器技术》、《PLC及其应用》等课程的实训教学
气动机械手实训模型是一套完整的气动机械手搬运装置,由安装底板、气动手指、单杆提升气缸、双导杆伸缩气缸、旋转摆动气缸、多种类型磁性传感器、多种类型电磁阀、空气过滤器、气源控制滑阀及接线端子排等组成。
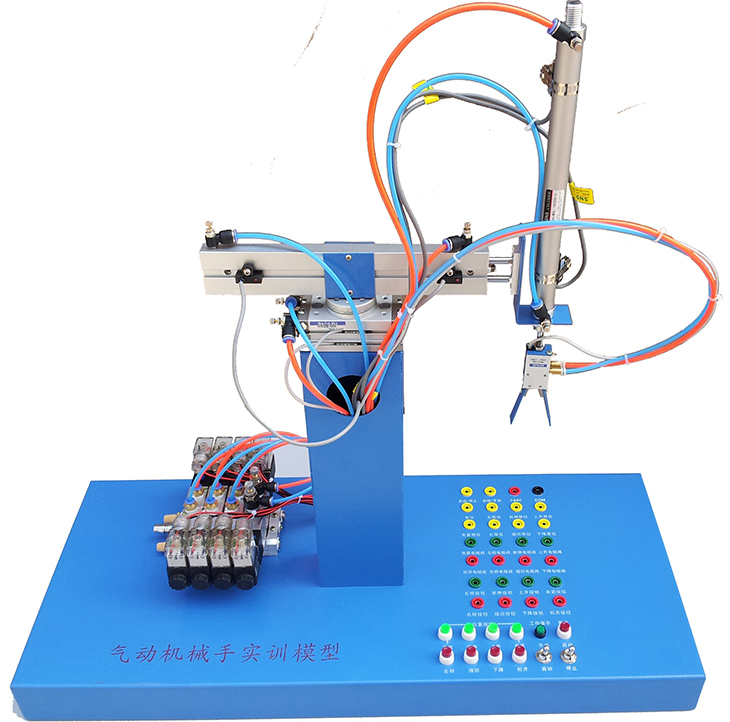
气动机械手实训模型主要完成物料的搬运功能,气动机械手通过前臂下降,气动手指夹紧物体,手臂缩回,手臂右摆,手臂前伸,前臂下降,手爪松开将物体放到指定位置等动作后,机械手返回原位。将电磁阀及磁性开关等元件的引出线连接到相应的端子接线排上,方便使用。
气动机械手实训模型能满足职业院校可编程控制器、机电一体化、气动技术等相关课程的实训教学。
规格:1100X650X1300mm
控制电源:DC
24V
主控系统:FX1N-24MT
内置数字量I/O(14路数字量输入/10路输出),设有控制按钮,设有急停开关。
采用型材操作平台、旋转气缸及电气控制等部分组成。
|
工业互联网工程应用平台 |
|
模块化柔性生产线实训系统(八站) |
|
机电与电气控制PLC实训平台 |
|
西门子工业自动化技术综合教学及人才认证实训平台 |
|
西门子PLC综合实训平台 |
|
可编程控制器(PLC)实训平台 |
|
可编程逻辑控制器智能电气控制实验平台 |
|
可编程控制器应用技术实训设备 |
|
可编程控制器自动化教学装置 |
|
PLC可编程控制器综合实训考核装置 |
|
可编程控制器实训设备 |
|
可编程控制器(PLC)实训设备 |
|
智电综合实训装置 |
|
网络化PLC综合控制实训平台 |
|
PLC智能综合实训平台 |
|
自动化实训操作台 |
|
技师工作站、西门子plc实训平台 |
|
PLC可编程电器控制综合实训装置(S7-1200)(PLC+变频+电气控制+触摸屏) |
|
柔性智能制造实训系统 |
|
数字化工业控制实训平台 |
|
电气控制系统实验(教学)台 |
|
自动化实训装置 |
|
机电一体化自动化生产流水线实训设备 |
|
工业自动化及电气控制综合实训装置 |
|
工业自动化实训平台 |
|
机械手实训装置 |
|
PLC控制综合实训系统 |
|
工业自动化网络控制平台 |
|
自动化驱动实训系统 |
|
机电创新实训平台 |
|
PLC综合应用实训台 |
|
工业自动化综合实训平台 |
|
自动化设备综合实训台 |
|
PLC电气自动化控制实训平台 |
|
工业自动化实训考核设备 |
|
PLC及电气控制综合实训台 |
|
工业网络智能控制与维护实训平台 |
|
通用PLC与人机界面实验装置 |
|
PLC电器实训台 |
|
ABB变频器实训装置 |
|
PLC与变频技术实训装置 |
|
PLC工业网络集成控制技术实验开发平台 |
|
可编程序控制系统设计师综合实训设备 |
|
PLC可编程控制技术综合实训装置 |
|
现代电气控制系统安装与调试实训平台 |
|
机电自动化实训操作平台 |
|
智能光机电一体化综合实训考核设备 |
|
智能机电一体化实训平台 |
|
通用机电设备安装与调试实训装备 |
|
自动生产线实训考核装置 |
|
自动检测生产线实训装置 |
|
自动生产线拆装与装调实训装置 |
|
电气智能化系统安装技术实训装置 |
|
电气控制与PLC应用实训平台 |
|
智能PLC电气控制综合实训平台 |
|
机电一体化智能综合实训平台 |
|
机电一体化智能实训平台 |
|
PLC可编程控制实训装置、电气设备运行与控制实训室、PLC技术实训室设备 |
|
PLC电气控制综合实训平台 |
|
PLC电气控制综合实训平台 |
|
PLC、变频器、触摸屏综合实训平台 |
|
PLC可编程综合实训平台 |
|
电气控制综合实验系统 |
|
电气控制及工业数字化装调实训考核设备 |
|
电气综合实训装置、西门子S7-1200PLC综合实训设备 |
|
可编程控制系统工程应用实训平台 |
|
PLC综合实训台-1200 |
|
PLC综合实训平台-三菱 |
|
自动送料装车实训模型 |
|
PLC实训装置 |
|
柔性灌装自动化实训平台 |
|
PLC综合实训设备 |
|
智能制造技术应用一体化学习工作站 |
|
机电一体化实训工作站 |
|
PLC可编程与变频技术综合实训装置 |
|
工业自动化网络控制平台(双面) |
|
工业自动化网络控制实训平台(单面) |
|
机电一体化综合实训考核系统 |
|
自动控制理论及计算机控制技术实验装置 |
|
工业互联网工程技术实训设备 |
|
电气自动化技术考核实训装置 |
|
自动控制原理实验装置 |
|
创新模块化自动生产线实训系统 |
|
PLC设备安装调试实验实训系统 |
|
工业运动控制技术实训台 |
|
电气控制与PLC控制实验装置 |
|
电气控制与PLC综合实训装置 |
|
自动化控制技能实训台 |
|
电气控制系统综合实训设备 |
|
可编程控制器实训装置 |
|
电气自动控制电路装调维修考核装置 |
|
机电一体化与工业网络高级应用实训平台 |
|
工业控制技术教学与考核平台 |
|
模块化柔性生产线实训系统(八站) |
|
柔性灌装自动化生产线实训系统 |
|
MES网络型模块式柔性自动化生产线实训设备 |
|
运动控制实验装置 |
|
运动控制综合实训装置 |
|
六工位PLC可编程控制器实训台 |
|
机电一体化综合创新教学平台 |
|
机电一体化综合实训考核设备 |
|
PLC可编程控制器、触摸屏、变频器 伺服控制实训平台 |
|
PLC可编程技术综合实训装置 |
|
PLC可编程控制实训设备 |
|
网络型PLC可编程控制技术综合实训装置 |
|
网络型可编程控制器综合实训装置 |
|
可编程控制器S7-1200综合实训设备 |
|
网络型PLC可编程控制器综合实训装置( PLC+ 变频 + 电气控制 + 触摸屏) |
|
可编程控制器综合实训装置(S7-1500) |
|
网络型PLC可编程控制器综合实训装置(PLC+变频+电气控制+触摸屏) |
|
西门子1214C网络型可编程控制器综合实训装置 |
|
网络型PLC可编程控制技术综合实训装置(PLC、变频器、触摸屏) |
|
网络型PLC实训装置,PLC控制+变频+触摸屏+步进+伺服 |
|
电气实训操作台(PLC+变频+电气控制+触摸屏) |
|
PLC可编程控制器实验箱 |
|
电气与PLC可编程控制综合实训装置 |
|
PLC可编程控制器综合实训装置 |
|
可编程控制综合实训装置 |
|
PLC可编程控制器实训装置 |
|
PLC可编程控制器实训装置 |
|
自动化控制技能实训台 |
|
物联网综合应用实训系统 |
|
物联网工程综合应用实训装置 |
|
物联网智能家居实训系统 |
|
PLC实训台 |
|
PLC电气技术实训装置 |
|
电气控制PLC实训台 |
|
可编程控制器、单片机综合实训装置 |
|
机电一体化实训平台 |
|
电气控制与PLC技术一体化实训设备 |
|
可编程技术实训设备 |
|
单片机技术应用实训考核装置 |
|
PLC控制技术与组态技术实训装置 |
|
单片机应用技术实训装置、六边形学生桌 |
|
单片机模拟实训台 |
|
单片机技术实训装置 |
|
单片机应用创新实验平台 |
|
单片机控制功能实训考核装置 |
|
单片机技术应用实训考核装置 |
|
PLC可编程控制器实验装置 |
|
PLC控制及变频驱动技术教学实训装置 |
|
可编程控制器综合实训装置(PLC+变频+电气控制+触摸屏)S7-1200 |
|
PLC综合控制实训装置 |
|
电机装配与运行检测实训平台 |
|
网络型PLC可编程控制器综合实训装置(PLC+变频+电气控制+触摸屏) |
|
网络型可编程控制器实验装置(三菱) |
|
光机电一体化变频伺服控制综合实训平台 |
|
工业网络控制实训装置 |
|
工业机械传动装调实训平台 |
|
工业数字化网络综合实训平台 |
|
工业运动控制技术实训装置 |
|
工业运动控制技术实训台 |
|
立体仓库实物教学实训装置 |
|
单片机控制二维运动实训设备 |
|
西门子工业控制与PLC综合实训平台 |
|
PLC可编程控制器实验箱 |
|
网络型可编程控制器综合实训平台 |
|
西门子S7-1500实训设备,PLC+变频+电气控制+触摸屏 |
|
工业网络与组态实训装置 |
|
可编程电气控制综合实训装置 |
|
PLC网络综合实验平台 |
|
PLC可编程控制器综合实训装置(欧姆龙) |
|
可编程控制器实训装置 |
|
可编程变频器及电气控制综合实训装置 |
|
工业自动化通信网络实验平台 |
|
工业自动化综合实训装置 |
|
工业控制综合实训装置 |
|
工业自动化通信网络实验台 |
|
可编程控制器自动化教学装置 |
|
变频技术实验设备 |
|
PLC控制技术综合实训装置 |
|
工学结合PLC实训台 |
|
(三菱PLC)综合实训装置 |
|
西门子PLC控制综合实训装置 |
|
PLC可编程变频调速综合实训装置 |
|
PLC单片机变频调速综合实训装置 |
|
PLC、变频器、电气控制、触摸屏实训装置 |
|
cr40plc可编程控制器综合实训装置 |
|
智能电控(PLC)实训平台 |
|
可编程(PLC)实训台 |
|
可编程控制实验装置 |
|
可编程控制实验装置及单片机综合实验台 |
|
可编程控制器、单片机、自动控制原理综合实验台 |
|
PLC试验台、PLC实验实训考核设备 |
|
PLC变频器、伺服驱动器、步进电机驱动器实训装置 |
|
工业自动化综合实训装置(PLC+ 变频器 + 触摸屏 + 单片机) |
|
工业自动化通讯网络实训系统 |
|
网络型PLC可编程控制实验装置 |
|
PLC可编程控制实训装置PLC+电气控制 |
|
网络型PLC可编程控制器综合实训装置 |
|
PLC变频器触摸屏培训设备 |
|
调速PLC可编程控制综合实训装置 |
|
PLC可编程控制器实验台(三菱FX3U-48MR、变频、触摸屏) |
|
PLC可编程控制器、单片机开发应用及电气控制综合实训装置 |
|
可编程控制器实训装置 |
|
单片机原理与应用实验平台 |
|
单片机应用综合实训平台 |
|
PLC单片机实训台 |
|
单片机控制技术实训平台 |
|
单片机可编程控制综合实验装置 |
|
单片机技术开发平台 |
|
单片机开发综合实验装置 |
|
单片机开发应用技术综合实验装置 |
|
单片机控制技术实训平台 |
|
创新型单片机和EDA设计综合实验开发装置 |
|
单片机•CPLD/FPGA开发综合实验装置 |
|
AB自动化控制实训装置 |
|
单片机应用技术实训装置 |
|
单片机控制功能实训考核装置 |
|
单片机开发系统、自动控制原理综合实验装置 |
|
网络型可编程控制器(1500 PLC)实验装置 |
|
PLC可编程控制器实验装置
(PLC+伺服+变频器+电气控制+触摸屏) |
|
工业物联网与自动化控制实训台 |
|
工业数字化网络综合实训平台 |
|
单片机应用实训考核装置 |
|
单片机应用创新实验平台 |
|
单片机技术应用实训考核装置 |
|
网络型可编程控制器(1200 PLC)实验装置 |
|
网络型PLC可编程控制器、自动控制原理综合实验装置 |
|
PLC单片机变频器触摸屏实训台 |
|
PLC可编程控制技术综合实训装置(PLC、变频器) |
|
网络型PLC可编程控制/微机接口及微机应用综合实验装置 |
|
网络型PLC可编程控制器综合实训装置(PLC+变频ABB+电气控制+触摸屏) |
|
网络型PLC可编程控制器综合实训装置(PLC+变频+电气控制+触摸屏) |
|
网络型PLC可编程控制器、变频调速、触摸屏、电气控制及单片机实验开发系统综合实验装置 |
|
网络型PLC可编程控制器、变频调速、触摸屏、电气控制及微机接口与微机应用综合实验装置 |
|
可编程控制系统实训平台 |
|
可编程控制器实训操作台 |
|
PLC可编程控制实验及单片机实验开发系统综合实验装置 |
|
PLC可编程控制系统、单片机实验开发系统、自动控制原理综合实验装置 |
|
PLC可编程控制系统、微机接口及微机应用综合实验装置 |
|
计算机装调与维修技能鉴定装置 |
|
计算机组装与维护实训装置 |
|
信号与系统・控制理论・计算机控制技术实验台 |
|
单片机实训箱、 可编程控制器实验箱 |
|
工业机器人拆装和维护平台 |
|
工业机器人教学实训装置 |
|
工业机器人应用编程实训平台 |
|
工业机器人综合应用实训平台 |
|
工业机器人多功能实训台(ABB带视觉) |
|
工业机器人循环生产线实训装备 |
|
工业机器人基础实训设备(ABB机器人系统) |
|
工业机器人拆装与调试实训台 |
|
机器人应用实训室设备 |
|
工业机器人多功能实训平台 |
|
工业自动化实训平台 |
|
PLC可编程控制器综合实验装置 |
|
数字化工业控制实训平台 |
|
工业电气自动化及电工技能考核实训平台 |
|
可编程工业控制实训平台 |
|
PLC综合实训台 |
|
三菱FX3G-40MR光机电一体化实训考核装置 |
|
西门子S7-1200光机电一体化实训考核装置 |
|
PLC可编程控制器综合实训装置 |
|
工业自动化综合实训装置 |
|
工业自动化综合实训装置(PLC+变频器+触摸屏+单片机) |
|
工业全数字直流调速系统综合实训装置 |
|
变频调速系统开发平台 |
|
变频器工作原理实训设备 |
|
变频调速技术实训装置 |
|
直流调速实训装置 |
|
交直流调速实训装置 |
|
工业电气综合实训装置 |
|
工业自动化控制一体化实训室设备 |
|
工业自动化综合实训装置 |
|
工业自动化综合实训装置(PLC+变频器+触摸屏+单片机) |
|
工业自动化综合实训装置(西门子) |
|
工业控制创新实训平台 |
|
自动化生产线实训室设备 |
|
全数字交流调速系统实验装置 |
|
工业全数字控制实训装置 |
|
PLC训练装置 |
|
工业电气自动化及电工电子技能考核实训平台 |
|
工业运动控制技术实训台 |
|
网络型plc综合实验平台 |
|
工业控制与plc综合实训平台 |
|
工业自动化网络控制平台 |
|
网络型可编程控制器综合实训装置 |
|
可编程控制器(三菱)综合实训室设备 |
|
液压传动实验台、液压PLC实验台、气动液压PLC实验台、电梯模型、智能建筑实验室设备 更多产品>> |
|
透明液压传动与PLC控制实训装置 |
|
液压与气动实训装置 |
|
工业液压与PLC控制实训装置 |
|
液压与气压传动综合实训装置(工业型) |
|
液压与气动工程技术实训台 |
|
PLC控制液压传动实训装备(单面液压) |
|
PLC控制气动实训装备(单面) |
|
透明液压传动与PLC控制实训装置 |
|
气动PLC控制实训装置 |
|
液压与气压传动(轧钢机)综合实训装置 |
|
液压传动测试实验台 |
|
工业型液压综合实验台 |
|
PLC控制液压与气动综合实训装置 |
|
机械装配平台与液压综合实训装置 |
|
液压与气动拆装维修实训台 |
|
液压元件拆装实训装置 |
|
液压与气压传动综合实训装置 |
|
液压气动PLC控制综合实训装置 |
|
实验教学用液压实验台(可视型) |
|
多功能气动教学实验台 |
|
液压气压传动与控制实训操作平台 |
|
透明液压传动与PLC实训装置 |
|
液压与气压PLC控制综合实训装置 |
|
透明液压与气动PLC控制综合实训装置(软件控制) |
|
透明液压传动与PLC控制实训装置 |
|
透明液压传动与PLC控制实训装置、挖掘机实训台 |
|
透明起重机液压系统与PLC控制实训装置 |
|
液压挖机与人机界面实训装置 |
|
高级电液压实训系统 |
|
透明液压传动与触摸屏实训装置 |
|
透明液压与气压传动综合实训装置(PLC控制、液压气动二合一) |
|
液压传动与PLC实训装置(工业型单面) |
|
PLC控制透明液压与气动综合实训装备 |
|
工程机械专业实训(验)设备 |
|
液压装载机实训系统 |
|
液压挖掘机实训系统 |
|
气动机械手实训考核装置 |
|
双面电气动PLC控制实训装置 |
|
气动传动实验台 |
|
液压传动基础实训箱 |
|
气动实训箱 |
|
液、气、电一体化实训平台 |
|
液压与气动PLC控制综合实训装置(工业型) |
|
气动机械手实训模型 |
|
透明液压传动与PLC实训装置 |
|
机电液气一体化实训平台 |
|
液压传动技术实验台 |
|
液压元件拆装实训台(实物) |
|
液压传动教学装置 |
|
气动实训教学装置 |
|
双面透明液压传动技术教学装置 |
|
透明液压传动演示系统 |
|
液压传动实验台 |
|
透明液压传动与PLC实训装置 |
|
透明液压PLC控制实训装置 |
|
气动PLC控制实训装置 |
|
透明液压与气动传动综合实训装置 |
|
多功能气动教学实训台 |
|
液压与气压传动综合实训台(工业型) |
|
工业型液压综合实验台 |
|
PLC控制液压与气动综合实训装置(工业型) |
|
透明液压传动与PLC控制实训装置 |
|
透明气动PLC控制实训装置 |
|
液压控制综合实训装置 |
|
气动控制综合实训装置 |
|
四合一透明液压传动演示系统 |
|
液压与气压实验台 |
|
透明液压传动与PLC实训装置(铝合金框架) |
|
透明液压挖掘机系统与PLC控制实训装置 |
|
透明液压装载机PLC控制实训台 |
|
透明液压推土机实训台 |
|
叉车液压系统实训台 |
|
挖掘机液压系统与PLC控制实训装置 |
|
透明液压PLC控制实验装置(挖掘机液压试验台) |
|
液压挖掘机实训装置 |
|
起重机械实训装置 |
|
装载机液压系统与PLC控制实训装置 |
|
起重机液压系统与PLC控制实训装置 |
|
液压与气压传动PLC综合实训装置(工业型) |
|
液压传动与PLC实训装置(工业型单面) |
|
透明装载机实训台 |
|
透明挖掘机实训台 |
|
传感器实训设备、传感器实验设备、实验箱类、变频调速实验装置、工业自动化实训设备 |
|
传感器与检测技术实训平台 |
|
传感器与智能控制技术实训台(含视觉、工业RFID) |
|
电力系统传感器与检测技术实训系统 |
|
检测与传感检测技术实训装置 |
|
传感器与检测技术试验台 |
|
传感器应用技术实训考核设备 |
|
传感器检测技术实训平台 |
|
传感器与检测技术实训装置 |
|
检测与传感检测技术实训装置 |
|
传感器综合实训装置 |
|
智能工业传感器检测及控制实训台(含视觉) |
|
工业传感器检测及控制实训台 |
|
工业传感器应用与检测综合实训台 |
|
传感器技术实训室,传感器技术实训台,传感器技术实训装置 |
|
创新型测控传感器技术综合实验实训装置 |
|
传感器与检测技术实验台(37种传感器) |
|
传感与检测实训装置 |
|
传感器综合实验系统(22种传感器技术实验箱) |
|
检测与转换传感器技术实验仪(20种传感器) |
|
传感器系统综合实训装置 |
|
传感器技术实训装置 |
|
传感器应用技术实验设备 |
|
传感器应用技术实训考核设备 |
|
传感器综合实验设备 |
|
传感器与检测技术实训装置 |
|
传感器系统实验仪 |
|
传感器与检测技术实验台 |
|
传感器技术实验箱 |
|
增强型型检测与转换(传感器)技术实验装置 |
|
压力传感器标定实验系统 |
|
热电阻和热点偶温度传感器校验实验系统 |
|
单片机传感器综合实验实训平台 |
|
液体流量仪表标定实验系统 |
|
压力控制测量实验装置 |
|
液位流量控制实验装置 |
|
气动薄膜控制阀与电气安装阀门定位调校实训置 |
|
检测与转换(传感器)技术实验17种箱 |
|
传感器与检测技术实训装置 |
|
创新型测控/传感器技术综合实验实训平台 |
|
生物医学传感器实验台 |
|
单片机传感器综合实训平台 |
|
多媒体工程制图设计实验室设备 |
|
多功能升降式实用绘图桌 |
|
工程制图实验室设备 |
|
建筑工程制图实训室-土木工程实训室 |
|
钳工技能实训平台(六工位) |
|
六角钳工技能实训台 |
|
钳工技能实训考核平台 |
|
钳工职业技能等级鉴定考核装置 |
|
钳工技能实训台 |
|
焊工、铆工实操室成套设备 |
|
焊接多功能实训实验室成套设备 |
|
钳工实训室简介、钳工实训工作台 |
|
机电一体化实验室设备、教学数控车床、教学数控铣床、透明电机模型、变压器模型 更多产品>> |
|
光机电一体化实训考核装置 |
|
机电一体化实训装置 |
|
自动生产线拆装与调试实训装置 |
|
机电一体化实训装置 |
|
工业自动化综合实训装置 |
|
煤矿自动化控制实训平台 |
|
机电一体化综合实训考核设备 |
|
自动生产线装配与调试实训装置 |
|
自动化生产线实训考核装备 |
|
光机电气一体化控制实训平台 |
|
机电一体化综合实训实验系统 |
|
机电一体化系统综合实训平台 |
|
机电一体化综合系统实训装置 |
|
数字化工业机器人柔性生产线实训平台 |
|
MES网络型模块式柔性自动化生产线实训系统 |
|
MPS模块式柔性自动化生产线实训系统(六站) |
|
灌装自动化生产线实训装置,机电一体化技师实训考核装置 |
|
光机电一体化实训考核装置(六轴工业机器人) |
|
工业机械手实训装置 |
|
机电一体化综合实训考核系统 |
|
机电一体化综合系统实训设备 |
|
光机电一体化实训考核装置 |
|
自动化生产线实训考核平台 |
|
自动生产线实训装置 |
|
智能控制技术实训台 |
|
自动化控制技术实训装置 |
|
智能机电一体化综合实训考核设备 |
|
机电一体化综合实训系统 |
|
光机电气一体化实训装置 |
|
电机故障诊断与维修检测实训考核装置 |
|
机床电路实训考核设备 |
|
机床电路实训设备 |
|
机床自动化电气控制技能实训考核系统 |
|
机床电气线路(四合一)考核实训装置 |
|
机床电气控制实训装置(柜式双面、四合一、四种机床) |
|
机电一体化综合实训室设备、机电液气一体化实训平台 |
|
数控设备维修实验室设备、数控机床电气故障检测实训台 |
|
机电技术综合实训考核装置 |
|
光机电一体化实训考核装置 |
|
物料分拣实训装置 |
|
煤矿培训自动化试验台 |
|
自动生产线实训考核装置 |
|
工业自动生产线实训装置 |
|
机电一体化综合实训考核装置 |
|
光机电一体化实训室设备、自动生产线实训室设备 |
|
柔性自动化生产线实训系统(六站) |
|
机电气液一体化综合实训装置 |
|
智能型机床实训鉴定考核平台 |
|
机床电气综合实训考核鉴定装置 |
|
机床PLC电气控制实训考核装置 |
|
机床电气与智能实训考核装置 |
|
3D虚拟机床及机床线路实训装置 |
|
机床电气装配与调试竞赛平台 |
|
机床电气控制技术实训台 |
|
网络化智能型机床电气技能实训考核装置 |
|
机床电气线路排故实训室设备 |
|
机床智能实训考核装置 |
|
机床电气培训考核实验装置 |
|
网孔型万能机床电路实训考核鉴定装置(含PLC、变频器) |
|
网孔型万能机床电路实训考核鉴定装置 |
|
数控车床装调维修实训考核装置 |
|
数控铣床装调与维修考核实训设备 |
|
数控车床电气控制与维修实训考核装置 |
|
多系统数控机床虚实一体训练机 |
|
机床电气实训智能考核装置(五种机床) |
|
数控机床维修实训设备电气控制柜 |
|
数控车床电气安装与调试实训设备 |
|
车床综合维修考核装置(各种系统) |
|
精密双轴十字滑台实训设备 |
|
数控铣床装调与维修实训台 |
|
数控车床装调与维修实训台 |
|
数控加工中心实验室设备 |
|
数控加工中心装调与维修考核实训设备 |
|
数控车床装调与维修考核实训设备(GSK980TDi) |
|
数控铣床装调与维修考核实训设备(广数GSK-980MDi) |
|
数控车床维修综合实训台、数控铣床维修综合实训台 |
|
电工技能实训考核柜 |
|
机床电气控制技术及工艺实训考核装置(网孔板) |
|
数控车铣复合机床、五轴五联动数控加工中心、五轴数控加工中心虚实一体训练机 |
|
SINUMERIK 840DSL 五轴数控加工中心虚实一体训练机 |
|
多系统数控机床虚实一体训练机(三轴 |
|
多系统数控机床虚实一体训练机 |
|
数控五轴加工实训室设备 |
|
五轴数控加工中心虚实一体训练机 |
|
数控机床故障诊断与维修实训装置 |
|
步进电机交流伺服电动机驱动系统实验装置 |
|
光机电气一体化控制实训设备 |
|
光机电气一体化实训设备 |
|
光机电一体化控制实训装置 |
|
自动化生产线实训平台 |
|
智能制造人才综合实训室建设方案 |
|
自动生产线实训系统 |
|
MPS模块式柔性自动化生产线实训系统(六站) |
|
智能型万能机床电气实训考核鉴定装置 |
|
变压器/电机控制综合实验装置 |
|
电机及变压器综合实验装置 |
|
电机性能综合测试装置 |
|
电机与变压器维修实训设备 |
|
电机变压器维修及检测实训装置 |
|
电机故障诊断与维修检测实训考核装置 |
|
电机电控配线安装装置 |
|
机床电气控制实训装置 |
|
电机装配工技能实训装置 |
|
电机检修技能实训装置 |
|
电机拆装与维修实训台 |
|
无线遥控智能型综合机床电气电路实训考核鉴定装置 |
|
机床电气控制线路排故实训平台 |
|
模拟机床电气故障排除实训装置 |
|
机电一体化生产线实训设备 |
|
电气控制及PLC变频器电机实训装置 |
|
智能型四合一机床电气控制实训台 |
|
智能型四合一机床电气控制技能实训考核鉴定装置 |
|
电动葫芦智能培训考核鉴定设备 |
|
M7130K平面磨床电气培训装置 |
|
桥式起重机电气培训装置 |
|
龙门刨床电气技能实训考核装置 |
|
交流桥式起重机实训考核设备 |
|
Z3040B摇臂钻床电气技能实训考核装置 |
|
C650-2普通车床电气技能实训考核装置 |
|
Z3050摇臂钻床电路智能实训考核台 |
|
C6140普通车床电气技能实训考核装置 |
|
M7120平面磨床电气技能实训考核装置 |
|
T68镗床电气技能实训考核装置 |
|
X62W万能铣床电气技能实训考核装置 |
|
智能机床电路实训考核装置 |
|
空间及平面机构综合实验台
更多产品>> |
|
钳工技能实训考核平台
|
|
工业机械传动装调实训平台
|
|
机械传动装调综合实训平台
|
|
机构运动创新设计方案拼装及仿真实验台
|
|
机械基础实训室设备,机械设计实训设备,机械传动实训台 |
|
五金冲压模、拆装模具、铝合金拆装实训模具、注塑模具、冲孔模、级进模、复合模
|
|
机械基础综合实验室、机械设计实验室 |
|
机械传动性能综合测试实验台 |
|
机构创新组合设计实验台 |
|
机械运动创新方案拼装实验台 |
|
便携式机械系统传动创新组合设计实验台 |
|
单工位零件测绘实训装置 |
|
零件尺寸误差测量组合实训装置 |
|
零件形位误差测量组合实训装置 |
|
《几何体》实测绘图训练装置 |
|
《典型零件》实测绘图训练装置 |
|
《标准零件》实测绘图训练装置 |
|
《联接与配合》实测绘图训练装置 |
|
《千斤顶》实测绘图训练装置 |
|
《台虎钳》实测绘图训练装置 |
|
《齿轮泵》实测绘图训练装置 |
|
《减速器》实测绘图训练装置 |
|
测绘用装配体、齿轮泵、阀体及机件模型 |
|
减速器拆装教学模型 |
|
滚齿机教学模型 |
|
教学用插齿机实验台 |
|
轮系创新设计拼装及仿真实验台 |
|
机械传动方案优化综合测试实验台 |
|
曲柄滑块导杆凸轮机构实验台 |
|
螺栓与螺栓组联接综合实验台 |
|
创意组合机械系统装配训练综合实验平台 |
|
带传动效率测试分析实验台(基础型) |
|
液体动压滑动轴承实验台 |
|
便携式机械系统传动创新组合设计实验台 |
|
机械设计制造实训设备,自动化专业实训装置 |
|
曲柄导杆滑块凸轮测试实验装置 |
|
齿轮传动测试分析实验装置 |
|
链条与万向节传动测试实验装置 |
|
机械系统集成及参数可视化分析实验台 |
|
机械传动创意组合测试实验台 |
|
A型机械传动方案创意组合及参数分析实验台 |
|
B型机械传动方案创意组合及参数分析实验台 |
|
自动化夹具综合实验台 |
|
车刀量角仪 |
|
齿轮范成仪 |
|
四杆机构创客系统,零件搭接类实训设备 |
|
机械元件陈列柜 |
|
电机与变压器声动同步CD解说示教陈列柜 |
|
机械基础声动同步CD解说示教陈列柜 |
|
机械运动简图的测绘及分析实验模型 |
|
机械零件20教陈列柜 |
|
减速器声动同步CD解说示教陈列柜 |
|
机械原理声动同步CD解说示教陈列柜 |
|
机械制图16型陈列柜 |
|
模具示教陈列柜 |
|
金属切削示教陈列柜 |
|
金属工艺学CD解说示教陈列柜 |
|
公差配合陈列柜
|
|
钳工工艺学陈列柜 |
|
金属刀具陈列柜 |
|
机床夹具设计陈列柜 |
|
机械综合陈列柜《机械原理》《机械零件》《减速器》 |
|
车工工艺学陈列柜 |
|
机械设计基础陈列柜 |
|
机械设备拆装实训台 |
|
大型量具陈列柜 |
|
《机械创新设计》示教陈列柜 |
|
气动液压示教陈列柜 |
|
机械原理实训设备,机械创新实训装置,机械设计实训设备,机械传动实训设备 |
|
机械装调技术综合实训装置 |
|
机械制图模型,机械制图教学模型 |
|
机械制图立体示教模型、测绘模型画法几何投影箱 |
|
《机械基础》(中国劳动社会保障劳动版) |
|
机械设计拆装实验室,机械设计实验室 |
|
公差与检测技术实训室 |
|
机械系统搭接装配训练实验台 |
|
透明电动机实训教学模型、变压器教学模型 |
|
减速器拆装实验室,拆装实验用大型减速器教学模型(全铝制) |
|
机械装调技术综合实训装置 |
|
机械运动创新设计搭接实验台 |
|
机械机构基础实验台、机构创新实验台、动平衡原理实验台、轴系结构实验箱、机构搭接测试实验台、齿轮范成 |
|
透明五金冲压模拟机、透明液压注塑机演示模型、透明注塑成型模拟机、铝合金模具拆装模型 |
|
机械装调技术综合实训装置、机械设备装调与控制技术实训装置、机械装配技能综合实训平台 |
|
机械制图模型,机械机构模型,机械零件模型,机械原理模型,部件模型 |
|
电机及电子专业实训室、电工技术实训室 |




